
새로운 항공모빌리티 시대의 도래
항공모빌리티(Air Mobility) 산업을 내다보기 위해서는 글로벌 메가트렌드의 흐름 속에서 그 변화를 찾을 수 있다. 세상을 변화시키는 거대하고 거시적 동력인 글로벌 메가트렌드는 다음과 같은 5개 항목으로 요약한다.
① 도시화의 가속(Accelerating urbanization)
② 기후변화와 자원부족(Climate change and resource scarcity)
③ 인구구조의 변화(Demographic shifts)
④ 글로벌 경제력 이동(Shift in global economic power)
⑤ 기술의 도약 (Rise of technology)
이상과 같은 글로벌 메가트렌드 사이에는 상호역학관계가 있다. 즉 "도시화의 가속"과 "인구구조의 변화"는 대도시 인구집중으로 인한 교통 혼잡문제를 야기하고, "후변화와 자원부족"이나 "글로벌 경제력 이동"은 새로운 형태의 모빌리티를 요구하게 된다. 탄소배출이 없고 소음이 없으면서도 심각한 도심의 지상교통문제를 해결해 줄 항공모빌리티를 갈망한다. 이러한 요구에 “기술의 도약”은 바로 응답을 보낸다.
4차산업혁명과 함꼐 AI(Artificial Intelligence) 및 ICBM(IoT, Cloud, Big-data, Mobile)을 기반으로 무인 및 자율화 시스템(Unmanned and autonomous system), 전동화(Electrification), 그리고 초연결화 시스템(Hyper-connectivity system)등이 융복합된 기술적 도약은 드론택시(Drone taxi)와 같은 항공모빌리티를 갈망하게 되었다. 드론(D·R·O·N·E)은 역동적(Dynamic)인 로봇(Robotics) 기능을 갖는 비행체(Objective)들이 상호 네트웍(Network)을 형성하면서 폭발적(Energetic)인 파급력을 갖고 각 산업 분야에 확산 중이다.
드론택시, 항공택시(Air taxi), 나는 자동차(Flying car), 개인용 항공기(PAV, Personal Air Vehicle) 등의 이름으로 우후죽순처럼 개발에 활기를 띠면서 기존의 항공기업이나 자동차회사들이 새로운 항공모빌티 개발에 뛰어 들고 있다.
그동안 항공 모빌리티의 특징은 먼 거리를 높고 빠르게 운송하는 교통서비스를 제공하는 것이 특징이었지만 최근에는 도심 내(Intracity) 또는 도시 간(Intercity), 공항 간(Port to Port)을 연결해 주고 다른 교통수단과 연계하여 우리 일상 가까이에서 교통 편의를 제공해주길 원하고 있다. 이러한 시대적 새로운 요구에 부응하는 교통체계가 바로 도심형 항공교통체계(UAM, Urban Air Mobility)다.
당초 에어 택시(Air Taxi)용으로 헬리콥터를 활용하면 수직이착륙 기능이 있어 매우 적합할 것으로 생각하였으나 소음문제, 탄소 배출문제, 헬기의 치명적인 사고율, 그리고 높은 운임 등으로 대중 수용성에 한계가 있어 더이상 UAM 비행체로서 적합하지 않은 것으로 판단하였다.
이러한 교통 서비스를 제공하기 위한 새로운 항공 모빌리티는 활주로 없이 수직이착륙이 가능하고, 탄소배출이 없으며, 소음이 낮고, 도심 상공의 하늘 길에서 조종사가 탑승하지 않고도 안전운항을 보장할 수 있는 자율비행 능력과 도심에 위치한 버티포트(vertiport)에서 이착륙이 가능한 전기추진수직이착륙기(eVTOL)가 토탈 솔루션을 제공할 수 있는 해결사로 나서게 된 것이다.
따라서 UAM은 도심 내외 활용이 가능한 친환경 전기동력수직이착륙기(eVTOL)등을 이용하여 승객이나 화물 등을 탑재하고 도심 내외에서 저고도로 운항하는 소형비행체와 운항서비스를 총칭하는 체계라 한다. 또한 UAM은 도심 안팎에서 승객 및 화물 운송을 비롯하여 공공목적(긴급의료 등)과 관광사업 등을 위해 운용될 수 있으며, 타 교통수단과 연계되어 운용되는 새로운 미래 도심항공교통체계로 추진되고 있다.
UAM의 비행체는 eVTOL이 토탈 솔류션을 제공
항공 모빌리티가 우리 일상 가까이에서 교통 편의를 제공하기 위해서는 소음이나 환경문제를 최소화하고 적정한 요금은 물론 타 교통수단과 연계되어야 한다. 이러한 서비스를 제공하기 위한 연구가 미 항공우주국(NASA)을 중심으로 첨단 항공 모빌리티(Advanced Air Mobility) 프로젝트로 오래 전부터 다양하게 연구되고 있었다.
당초 도심 항공 모빌리티를 위한 에어 택시(Air Taxi)용으로 헬리콥터를 운영하기 위해 시범운영사업을 시도해 보았다. 하지만 헬리콥터의 장점을 살려 수직이착륙 및 단거리 운행에는 매우 적합할 수 있으나 소음문제, 탄소 배출문제, 헬기의 치명적인 사고율과 같은 문제뿐만 아니라 높은 운임 등으로 대중 수용성에 한계가 있어 더 이상 UAM 비행체로서 적합하지 않은 것으로 판단하였다.
다음은 UAM 비행체로서 플라잉 카와 개인용 항공기의 활용에 대한 선행 연구 프로젝트에 따르면 기존의 대형공항의 장거리 교통구간은 중대형 여객기가 담당하고, 그 보다 짧은 구간인 도심 구간이나 지역 간(RAM, Regional Air Mobility)은 자기용 자동차 기능과 자가용 소형 항공기 기능을 겸한 플라잉 카(Flying car)가 수요 응답형 모빌리티(Mobility on Demand)로 매우 전망이 있을 것으로 판단하였다. 초기 플라잉카 모델들은 도로주행과 공중비행 모두 가능하지만, 내연기관 엔진을 사용해 공해를 유발하고 소음이 크며, 대부분의 모델이 이륙하기 위해서는 활주로나 별도의 공간이 필요하다는 단점을 갖고 있었다. 즉, 기술적인 가치는 인정받았으나 도시의 환경오염이나 교통체증, 한정된 공간과 같은 문제들을 해결하기에는 많은 한계가 있었다.

이후 드론기술의 장점과 기존 항공기술의 결합이 자동차와 항공기를 결합한 전통적인 플라잉카의 단점을 극복할 수 있을 것으로 판단하고 드론형 공중 이동수단으로 배터리와 모터를 추진동력한 개인용 항공기(PAV, Personal Air Vehicle) 사업이 추진되었다. 전통적인 플라잉카의 단점을 극복하고, 도시문제를 해결할 수 있는 새로운 대안으로 떠오르게 된 것이다.
그 동안 활발하게 개발이 진행되고 있는 드론형 공중 이동수단은 기술적으로 배터리와 모터를 추진동력으로 하기 때문에 친환경적이고, 소음이 적을 뿐 아니라 건물 옥상 등 도심 내에서의 수직이착륙이 가능하였다. 즉, 드론형은 활주로가 필요하지 않고 지점간(Point-to-Point) 운송이 가능하기 때문에 초기 플라잉카 모델보다 UAM 생태계의 기체로서 적합한 운송수단으로 인식하였다. 특히 장애물이 많지 않은 공중에서만 이동하기 때문에 도로주행을 겸하는 초기 플라잉카 모델들에 비해 원격조종이나 자율비행의 적용이 수월하였다. 드론형 공중 이동수단의 경우 광의의 개념에서 플라잉카의 범주로 볼 수 있지만, 도로주행보다는 공중에서의 도시 내 이동에 초점이 맞춰져 있어 PAV라는 표현이 더 빈번하게 사용되었다.
PAV는 운용기준에 따라 공중에서의 비행만 가능한 싱글모드(Single Mode)와 공중에서의 비행과 도로에서의 주행이 모두 가능한 듀얼모드(Dual Mode)로 구분되어 진행되었으나 당시 PAV사업이 성공하기 위한 다음과 같은 운영요구사항에 대한 기술적 극복과제를 안고 있었다. 즉, ①개인용 항공기로써 이용하기 용이하여야 하고, ②자동화된 공역 통제 하에서 운행되어야 하고, ③저렴하고 충분한 전기동력시스템 및 동력원, ④경제적 운용 개념, ⑤운용지역에서의 소음 영향 최소화, ⑥새로운 인증기준 및 절차. ⑦전천후에 가까운 기체운용 능력, ⑧소형항공기 보다 높은 안전도 등이었다. 이러한 운영 요구 조건을 충족하기엔 그동안 기술적 성숙도나 개인용 항공기로서의 가격 및 운용 개념에 한계에 부딪치게 되어 미국의 플라잉 카 및 PAV개발 프로젝트는 기술개발 유산과 기술극복과제를 eVTOL개발사업에 물려주게 된 것이다.
따라서 최근 개발 붐을 일으키고 있는 eVTOL은 기존의 플라잉 카의 특징인 공륙 양용이 아니며, 개인용으로 이용되는 PAV가 아닌 공용 교통서비스를 제공하는 모빌리티(MaaS, Mobility as a Service)이며, 수요 응답형 모빌리티(MOD, Mobility on Demand)로서 글로벌 메가 트렌드에 대응하는 UAM 기체라 할 수 있다.
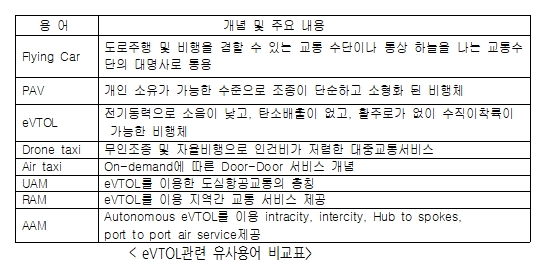
그러므로 아직도 혼재해서 사용되는 플라잉 카, PAV, 드론 택시, 항공택시, eVTOL, UAM, RAM, AAM 등의 다양한 유사한 용어들을 정리하면 다음 <표>와 같다.
eVTOL이 기존의 Helicopter, Flying car, PAV와 다른 장점을 네 가지로 꼽을 수 있다.
첫째 비행 중 소음이 현저히 낮다는 점이다. 도심 상공을 여러 대를 온종일 동시에 운항해야 하는 UAM 체계에서 소음은 지역사회 민원대상이 되기 때문에 버티포트 입지, 이착륙 경로, 항로의 고도나 경로, 운항시간 등을 고려하여 소음의 최소화를 기할 수 있다.
둘째는 항공운임이다. 기존의 택시나 탑승공유차량과 비교해서 선택할 수 있을 정도의 적당한 요금을 책정할 수 있다.
셋째 eVTOL의 중요한 특징 중의 하나가 분산전기추진동력(DEP, Distributed Electrical Power) 시스템이다. 기존의 싱글 로터 헬기와 달리 여러 개의 분산된 동력 시스템을 가지고 있기 때문에 소음이 현저하게 낮고 한두개가 상실되어도 나머지로 보상해서 비행을 지속하여 안전 착륙이 가능하다. 이러한 안전 요구수준을 인증받아야 상용화 운항이 가능하도록 되어 있다.
넷째 eVTOL은 비행 중 탄소배출이 전혀 없다. 따라서 완전 전기 추진 시스템을 채택했기 때문에 친환경 모빌리티로서 필수요건을 갖춘 것이다.
현재 상용화 된 UAM용 기체는 아직 한 대도 없다. 모두 미래 기술로 전 세계 기업들이 미래기술로 개발 중인 UAM용 eVTOL은 약 500여개로 그 형식과 성능은 매우 다양하다. eVTOL의 기본형식은 3 가지 형태로 분류할 수 있는데 ①Vectored Thrust 형으로 추력을 이착륙과 순항비행 상태에 따른 추력변형형)이 약 167개, ②Lift + Cruise형(이착륙과 순항비행에 필요한 별도의 추력장치 형)이 약 85개, ③Multicopter형(날개가 없이 복수의 로터를 이용하여 동력을 발생하는 형)이 약 148개가 현재 개발 중에 있다.
아직까지 개발이 완료되어 감항인증을 마치고 상용화에 이른 eVTOL기체는 없고 현재 열띤 개발 경쟁을 벌이고 있는 중이다. 이러한 전 세계적인 추세에 따라 우리나라도 K-UAM 개발 로드맵을 수립하고 정부의 다부처가 참여하는 사업으로 추진 중에 있다.
K-UAM의 eVTOL 개발 로드맵
우리나라는 UAM 개발정책 로드맵(K-UAM)을 2020년 6월에 발표하고 산·학·연·관 UAM Team Korea를 구성해 관련 기술 개발을 위한 K-UAM기술개발로드맵을 지난 3월에 발표하였다. K-UAM 정책 로드맵은 초기(‘25~), 성장기(’30~), 성숙기(‘35~)에 따라 목표성능 및 운용개념을 다음 <표>와 같이 제시하고 있다.
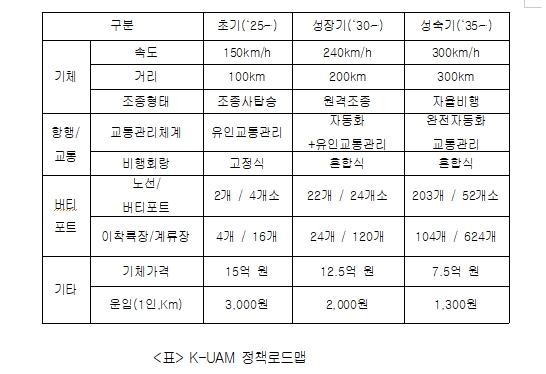
향후 ‘35년 성숙기가 되면 배터리 용량 증대 및 기체 경량화에 힘입어 비행가능 거리도 300Km(서울~대구 정도)로 증가하게 되고, 속도도 ’25년 150km/h에서 300km/h로 빨라지게 될 것으로 보고 있다. 특히 자율비행, 야간운항, 이착륙장 증설에 따른 노선 증가와 기체 양산체계 구축에 따른 규모의 경제효과가 요금 현실화로 이어져 교통수단으로서의 대중화가 가능해질 것으로 보고 있다.
UAM용 eVTOL 기본 형상
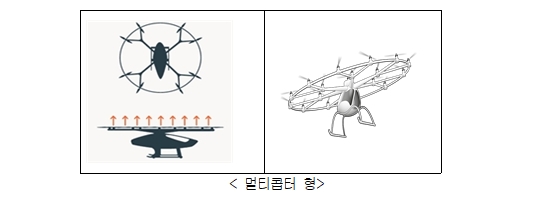
eVTOL기체의 유형은 크게 3 가지로 ①멀티콥터 유형, ②Lift + Cruise 형, ③Vectored Thrust 형으로 분류한다.
멀티콥터 유형은 단거리 비행에 적합하며, 기체가 작고 부품이 많지 않아 개발 및 인증 비용이 적다는 특징이 있다. 그러나 고정 날개가 달린 Lift + Cruise 형과 Vectored Thrust 형은 비행 성능이 멀티콥터 유형보다 뛰어나며, 단거리뿐 아니라 중거리 비행에서도 활용할 수 있고, 더 많은 사람을 태울 수 있다. 또한 문제가 발생했을 때 고정날개를 사용하여 활동할 수 있어 안전성도 뛰어나다는 장점이 있다.
① Multicopter 형
▷ 고정날개는 없고 복수의 회전날개로만 구성되어 있다.
▷ 복수의 전기모터-회전날개에 의한 비행으로 안전성이 비교적 높다.
▷ 정지비행에 효율이 높으나 전진비행에는 효율이 낮다.
▷ 비행속도는 100 km/h 내외로 비교적 속도가 느리다.
▷ 항속 거리는 40 ~ 100 km정도로 비교적 운항거리가 짧다.
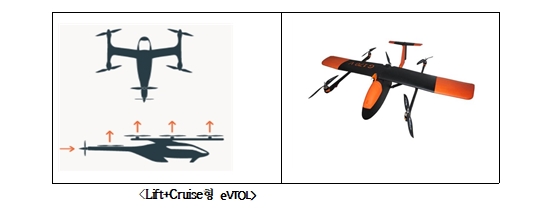
② Lift + Cruise 형
▷ 양력 추진부와 추력 추진부가 독립되어 있다
- 양력 발생을 위한 고정된 수직방향 로터
- 전진비행을 위한 분리된 프로펠러
▷ 세 가지 비행모드(고정익, 회전익, 천이비행)로 비행한다.
▷ Vectored thrust 보다 수직이착륙이 용이하다.
▷ 순항비행 시 전진비행효율이 높다.
- 비행속도는 180 km/h 내외
- 항속 거리는 80 ~ 150 km정도
③ Vectored Thrust 형
▷ 동일 추진부에 로터를 틸트시키는 시스템이다.
▷ 로터를 틸트시키는 방법은 크게 두 가지로 Tiltrotor 형과 Tiltwing이다.
- Tiltrotor형은 로터만 틸트시켜 로터를 프로펠러로(수직↔수평) 또는 프로펠러를 로터로(수평↔수직) 모드를 전환하는 형식이다.
- Tiltwing형은 로터가 부착된 날개를 동시에 틸트시켜 프로펄러기능과 로터 기능의 모드를 전환하는 형식이다.
▷ 세 가지 비행모드(고정익, 회전익, 천이비행)로 비행한다.
▷ 전진 비행효율이 높고, 제자리 비행효율이 낮다.
- 비행속도는 230 ~ 350 km/h 내외
- 항속 거리는100 ~ 300 km 정도
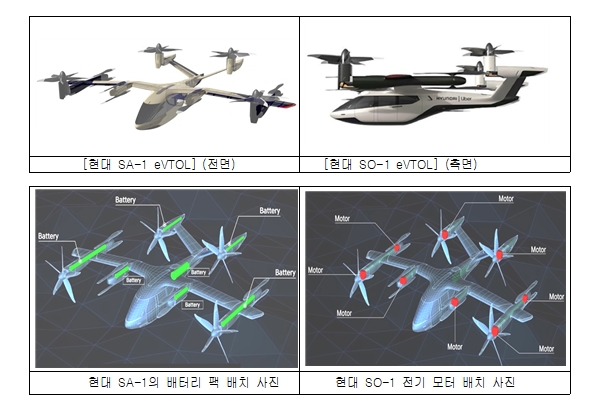
현대차가 개발 중인 UAM eVTOL
끝으로 우리나라 현대자동차에서 미국 회사와 공동으로 개발 중인 eVTOL을 소개한다.
현대자동차의 SA-1은 Vectored Thrust 형의 로터를 틸트시키는 Tiltrotor 형이다.
▶ 비행체 사양(Specifications)
▷ 항공기 형식(Aircraft type): eVTOL(Electric Vertical Take Off & Landing)
▷ 기체 조종(Piloting) : 초기 조종사 1 명 탑승 후 완전 자율비행으로 전환(1pilot, will be initially piloted and will transition into an autonomous aircraft)
▷ 승객내부(Passengers) : 4인 승객용, 내부통로 없이 짐을 실을 수 있는 충분한 공간 용(4 seats for a very comfortable ride (no middle seat) with enough space for baggage)
▷ 승객 편의 : 휴대전화 사용, 인터넷 등 제공( e Internet of Things for a better passenger experience)
▷ 순항속도(Cruising speed) : 약 290km/h
▷ 항속거리(Range) : 약 97km
▷ 순항고도(Cruising altitude) : 305-610m
▷ 배터리 충전시간(Recharging time) : 5-7분
▷ 추력계통(Propellers)
- 양력 및 추진용 프로펠러 : 각 5깃을 갖는 4개의 틸트로터 프로펠러(4 tiltrotor propellers (with 5 blades each) for forward and vertical lift)
- 수직이륙 전용 프로펠러 : 2개 깃을 갖는 동축회전 프로펠러 4 개 셋트(4 sets of stacked co-rotating propellers (each propeller with 2 blades) used only for vertical flight)
▷ 전진비행(Forward flight) : 4개의 프로펠러 사용(Uses 4 propellers)
▷ 수직이착륙 비행(VTOL flight) : 모든 프로펠러를 사용(Uses all its propellers)
▷ 전기모터(Electric motors) : 8 개
▷ 배터리(Batteries) : 급속 충전이 가능한 7개의 고밀도 배터리(7 high density batteries with quick recharge capabilities)
▷ 동체 및 날개 구조(Fuselage and wing construction) : 카본 복합재료(carbon composite material)
▷ 날개(Wings) : 1개의 주날개 형태는 약간 전진형(1 main high wing with a slight forward swept design)
▷ 꼬리날개부분(Tail assembly) : V형 꼬리날개 1 식(1 V tail)
▷ 창문(Windows) : 승객들이 외부를 조망하기 충분한 넓이의 창문(Wide windows for spectacular views for the passengers)
▷ 착륙장치(Landing gear) : 3개의 접이 들이식 착륙장치(Tricycle retractable landing gear)
▷소음수준(Low noise) : 내연기관을 장착한 헬리콥터보다 상대적으로 낮은 소음을 내는 여러 개의 소형로터를 사용하기 때문에 로터에서 나는 소음 및 엔진 소음을 대폭 줄일 수 있음(Having several, smaller rotors also reduces noise relative to large rotor helicopters with combustion engines.)
▷ 안전특성(Safety features)
- 기체에 부착된 분산전기 추진에 의해 공급되는 동력으로 다수의 로터 및 프로펠러를 구동하기 때문에 일부 시스템고장에도 안전을 높일 수 있고, 비행불능으로 추락사고가 감지되었을 경우 비상낙하산이 작동하여 치명적인 사고를 피할 수 있음(Distributed electric propulsion, powering multiple rotors and propellers around the airframe to increase safety by decreasing any single point of failure. An emergency parachute will also be a standard feature in case a catastrophic)
